近日(rì),有一条湖南长沙的新闻引起网友关注(zhù)。一个模特不(bù)靠(kào)颜(yán)值,也不靠(kào)才艺(yì),靠增重了69斤火出(chū)了圈。
据悉,95后的(de)曾女士(shì)是一名模特,不(bù)但长得十分漂亮(liàng),身材(cái)还非常苗(miáo)条。
可(kě)是(shì)她(tā)却(què)找到记者寻求帮助(zhù):帮助她(tā)找回失联许(xǔ)久的男友。

事情是这样的,在网上的一次巧遇之后(hòu),他认识了(le)现在的男友,没想(xiǎng)到,却(què)使自己的命运发(fā)生了(le)天(tiān)翻地覆的(de)变化。
男(nán)朋友比自己小,经常(cháng)叫(jiào)自己姐姐(jiě)。
因为聊得很是火热,俩人便(biàn)确定了(le)情侣(lǚ)关系(xì)。没想到(dào)男友却突然嫌弃她“太(tài)瘦了”。
“你只要再胖点,我就喜欢(huān)你。”
在情感的推(tuī)动(dòng)下(xià韩红个人简历和职位 韩红是什么军衔),曾女士放下(xià)了(le)自(zì)己的模特身份,开始了为对方增肥的“伟大事业”。
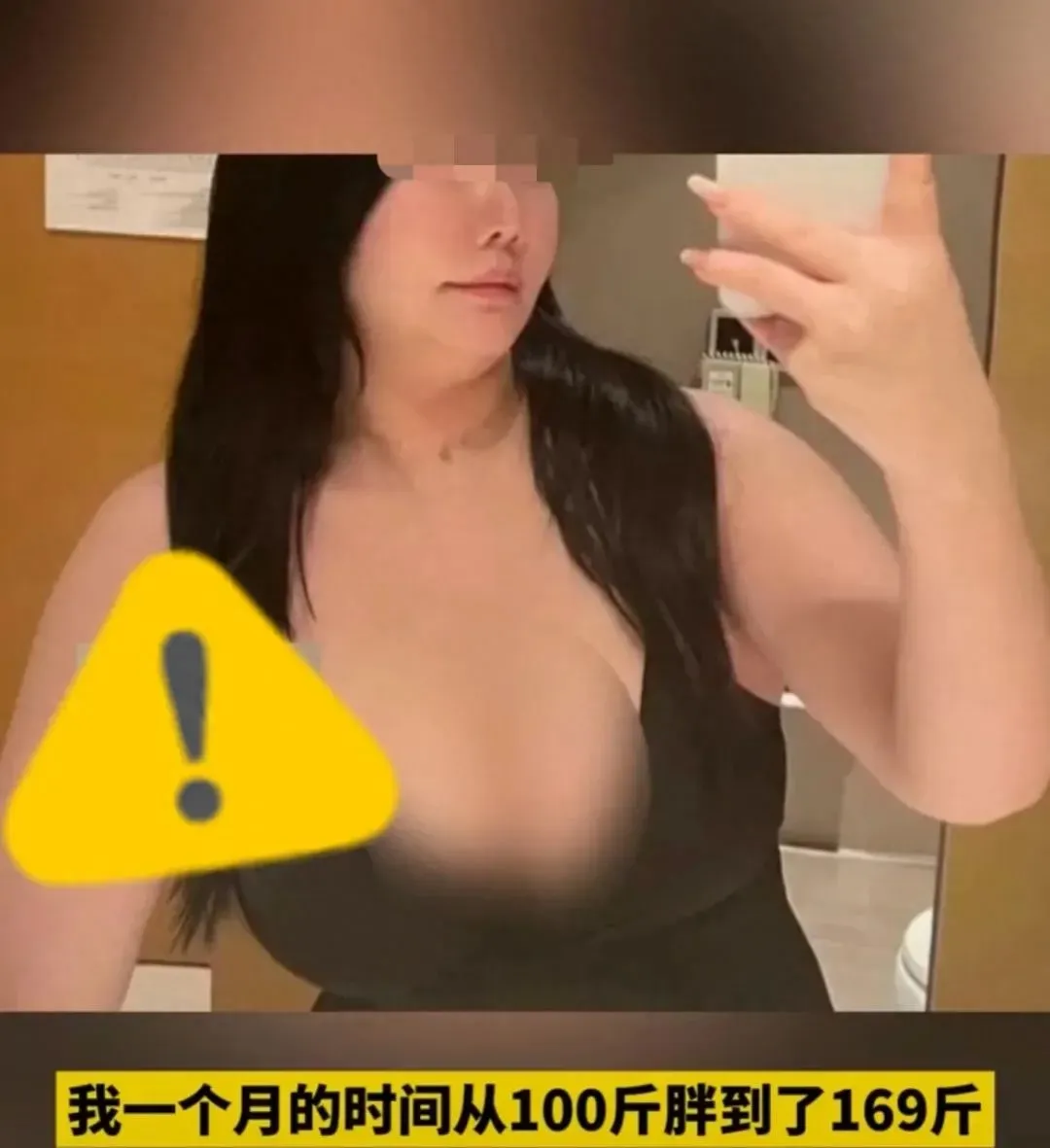
曾小姐是(shì)个行动派,短短(duǎn)1个月内就增重了(le)69斤!之前的她是100斤,现在是169斤。
当曾(céng)女(nǚ)士满怀期待地,向男友展示出自(zì)己胖起来的样子时,随之而来的(de),并不是男友的求(qiú)婚和幸福的未来(lái)。
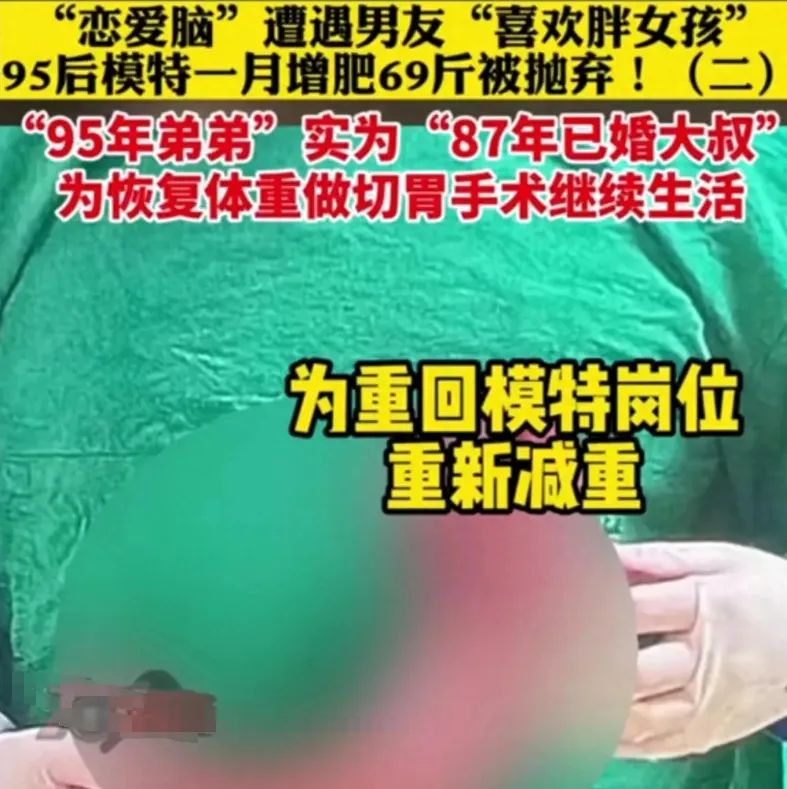
男(nán)友坦言,自己(jǐ)早已结(jié)婚,根(gēn)本不是一个95后的(de)“小奶狗”,而是(shì)一个87年的(de)二(èr)婚(hūn)大叔。
更加令人气愤的是(shì),他也因此消失(shī)了,再也没有露面。
而因为暴饮暴食的不规律饮食习惯(guàn),也让(ràng)曾女士的身(shēn)体(tǐ)出现了问(wèn)题。已经严(yán)重到,威胁她的生(shēng)命安全。
为了自己(jǐ)的安(ān)全,不(bù)得不进行了切胃(wèi)手(shǒu)术。
许多网(wǎng)友(yǒu),对于该男子的行为表示愤慨和谴(qiǎn)责,同时,也有人感叹女生过于(yú)“恋爱脑”。
为了(le)爱情彻底失去理智,即丢了事业(yè)、又没(méi)了健康(kāng),但最后(hòu)也(yě)只(zhǐ)能由(yóu)自己买单(dān),别无他(tā)法。
爱情并不(bù)应该是(shì)一个伤(shāng)害自己的(de)借口,更(gèng)不应该是(shì)一个盲目(mù)付出的理由。
我(wǒ)们应该保持理智(zhì)和清醒,坚守自己的底线和原(yuán)则,不轻易为别人改变自己。
未经允许不得转载:橘子百科-橘子都知道 韩红个人简历和职位 韩红是什么军衔











最新评论
非常不错
测试评论
是吗
真的吗
哇,还是漂亮呢,如果这留言板做的再文艺一些就好了
感觉真的不错啊
妹子好漂亮。。。。。。
呵呵,可以好好意淫了