周三沪指、中证1000指(zhǐ)数震(zhèn)荡(dàng),创(chuàng)业板指涨幅(fú)较大。大盘持续(xù)大跌后震荡修复,后面(miàn)榔(láng)头可能也是震荡的走势,很难(nán)有强势(shì)反弹。

中证1000指数破位大双(shuāng)头颈线位后,盘中回(huí)抽(chōu)了颈线位(wèi),同(tóng)时这(zhè)里也(yě)是年线处,压力很大(dà)。短期指数(shù)也可能有一个二次回抽,周二中(zhōng)阴高(gāo)点是(shì)反弹极限位置。短线的不确定(dìng)性较大,总之就(jiù)是任何的(de)反弹都是离场机会。

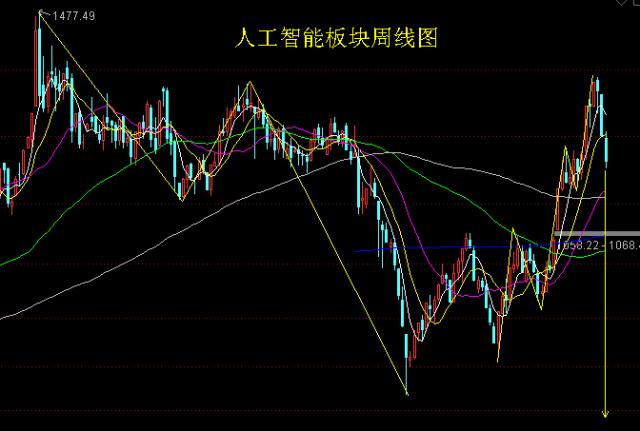
人工智能相关个股跌(diē)幅较大,从ChatGPT概念板块指数来看(kàn),跌(diē)破(pò)了颈(jǐng)线位,复杂(zá)头部有(yǒu)望就此成立。后市(shì)如果出现中(zhōng)长阴(yīn),那么顶部将正式确立。从人(rén)工(gōng)智能板块指数来看,近期持续回落,日线(xiàn)MACD形(xíng)成(chéng)大跨(kuà)度的顶背(bèi)离。从周线来看(kàn),自去年4月起走出3浪结构反弹,其中(zhōng)c浪为清晰的5浪结构,现在看5浪已经走完,顶部已经(jīng)出现(xiàn)。而接(jiē)下来就是大(dà)C浪了(le),去年4月的低点是一定会破(pò)的。该(gāi)板块是此(cǐ)前的市场龙头(tóu),不过(guò)本轮上涨只(zhǐ)是概念炒(chǎo)作(zuò),最(zuì)终必(bì)将是一地鸡毛(máo),从哪里来回哪里去。这个(gè)概(gài)念(niàn)彻(chè)底倒下(xià),也宣告整个市场反弹的结束。

欧美股市近(jìn)期还在(zài)高(gāo)位震荡,不(bù)过美(měi)股周二也出现中阴,反(fǎn)弹也(yě)应(yīng)该结束(shù)了。第一共和银(yín)行(xíng)财报显示其(qí)一(yī)季度存款骤降1020亿美元,Q1净利润同比下滑(huá)33%,周(zhōu)二大跌近50%。此前我(wǒ)们(men)多次强调(diào),美国银行(xíng)业的(de)危(wēi)机远未结束,只不(bù)过是暂(zàn)时(shí)止血而已。美联储5月仍将加息(xī),尽管很可(kě)能是最后一次,但后面(miàn)仍会维持高利率一段时间,不(bù)会很快降息。而全球(qiú)经济衰退(tuì)已经(jīng)很明显了,信贷需(xū)求将(jiāng)大幅下滑,资产也(yě)会(huì)减值,银行业必将再遭重击。
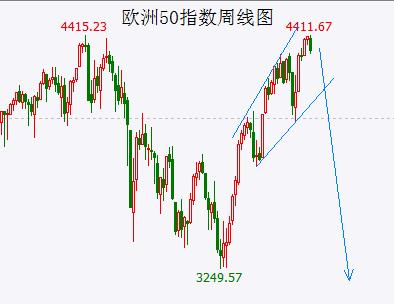

欧(ōu)股在3月银行危机止血后再创新高,但这是一次假突破。从(cóng)欧洲50指数来看,持续震荡后出现中阴(yīn),日(rì)线MACD开(kāi)始死叉,将(jiāng)形成大跨度的顶背(bèi)离(lí)。指数已经(jīng)逼(bī)近去(qù)年11月(yuè)的高点,形态上类似喇叭(bā)形(xíng)。欧股判断大势(shì)很简单(dān),你(nǐ)可以判断(duàn)前高能否有效突破就可以了。去年(nián)11月(yuè)那个(gè)高点很明显是一(yī)个(gè)级别很大的高点,如果有效突破则(zé)意(yì)味着会走(zǒu)一波很大(dà)的行情,但现在的基本面是很明显不(bù)支持(chí)的。因此是必然无法有效突破,而现在看假突破也不会有了,这里就是大顶,甚至可以(yǐ)说(shuō)是历(lì)史性的顶(dǐng)部(bù)。我不(bù)知(zhī)道(dào)欧股为(wèi)什么这么强势(shì),或许是预期差推动的,但我可(kě)以确定它未来必将大(dà)幅补跌(diē)。欧洲(zhōu)的各(gè)种问题(tí)解决(jué)了(le)吗?大环境很好(hǎo)吗?他们(men)以(yǐ)后可以(yǐ)一(yī)直买到便宜的天(tiān)然气(qì)、石油、农(nóng)产品吗?欧洲各国的经济(jì)都(dōu)很(hěn)好吗(ma)?如果答案都是否定(dìng)的,那么欧股的答案就是(shì)肯定的。
对于欧股而言,当前就是应该坚(jiān)决(jué)做空,这将(jiāng)是一(yī)次加州时间现在几点钟,加州时间与北京时间差历史性的机会!!!(中产(chǎn)投资)
未经允许不得转载:橘子百科-橘子都知道 加州时间现在几点钟,加州时间与北京时间差









最新评论
非常不错
测试评论
是吗
真的吗
哇,还是漂亮呢,如果这留言板做的再文艺一些就好了
感觉真的不错啊
妹子好漂亮。。。。。。
呵呵,可以好好意淫了